1. 核心要素与马尔可夫决策过程 (MDP)
强化学习 (Reinforcement Learning, RL) 的问题通常被数学化地建模为马尔可夫决策过程 (Markov Decision Process, MDP)。一个 MDP 由一个五元组
1.1. 智能体 (Agent) 与环境 (Environment)
- 智能体 (Agent): 学习者和决策者。它通过感知环境状态并选择行动来与环境交互。例如,玩游戏的 AI,自动驾驶的汽车,下棋的程序。
- 环境 (Environment): 智能体所处的外部世界,它接收智能体的行动,并以新状态和奖励作为响应。例如,游戏本身,真实的道路,棋盘。
交互循环过程:
- 在时间步
,智能体观察到环境的状态 。 - 智能体根据其策略
选择一个行动 。 - 环境接收行动
,发生状态转移,进入新的状态 。 - 环境向智能体反馈一个即时奖励
。 - 智能体进入新状态
,循环继续。
1.2. MDP 的核心组成部分
状态 (State,
- 状态空间 (State Space)
: 环境所有可能状态的集合。 - 状态 (State): 对环境在某一时刻的完整描述。一个好的状态必须具备马尔可夫性质(见 1.3 节)。
- 例子: 在棋类游戏中,状态是棋盘上所有棋子的位置;在机器人导航中,状态可以是机器人的坐标和速度。
行动 (Action,
- 行动空间 (Action Space)
: 在状态 下,智能体可以采取的所有可能行动的集合。 - 行动 (Action): 智能体可以做出的决策。
- 例子: 在棋类游戏中,行动是在某个位置落子;在机器人导航中,行动是“向前”、“向左转”、“向右转”。
环境动态 (Environment Dynamics): 转移与奖励
环境的动态描述了它如何根据智能体的行动而改变,这由状态转移和奖励两部分共同定义。
-
状态转移概率 (State Transition Probability,
): - 它表示在状态
采取行动 后,环境转移到下一个状态 的概率。 - 确定性环境: 如果
对某个 恒为 1,则环境是确定的。 - 随机性环境: 如果
是一个概率分布,则环境是随机的(如掷骰子)。
-
奖励 (Reward,
): - 奖励是 RL 的核心驱动力,是你为智能体设定的目标,可以被视为一种人机交互接口 (Human-Machine Interface)。
- 在最通用的形式下,奖励由一个奖励概率分布描述:
。 - 更常见地,我们使用奖励函数 (Reward Function),它代表期望奖励。根据定义的不同,它可以是:
(奖励只与当前状态和行动有关) (奖励与完整的状态转移有关)
- 目标: 智能体的目标不是最大化单步的即时奖励,而是最大化未来的累积奖励。
策略 (Policy,
- 策略是智能体的“大脑”或“行为准则”,它定义了智能体在特定状态下如何选择行动。
- 确定性策略 (Deterministic Policy):
。在每个状态下,选择唯一的行动。 - 随机性策略 (Stochastic Policy):
是一个概率分布,在状态 下以一定概率选择行动 。 - 强化学习的目标就是找到一个最优策略
,使得累积奖励最大化。
最优策略与最优价值函数
- 由于对称性等情况,可能存在多个不同的最优策略。
- 但是,对于一个给定的 MDP,最优价值函数
和最优行动价值函数 是唯一的。这意味着能达到的最好结果是唯一的,但达到该结果的方法(策略)可以不唯一。
折扣因子 (Discount Factor,
是一个用于衡量未来奖励重要性的超参数。它将未来的奖励进行折现,使得回报(Return)的总和是一个有限值。 使智能体“短视”, 使智能体“有远见”。
1.3. 马尔可夫性质 (The Markov Property)
马尔可夫性质是 MDP 的基石,也被称为**“无记忆性” (Memoryless Property)**。
-
直观理解: 未来只与当前有关,而与过去无关。如果知道了系统当前的状态
,那么所有之前的历史信息对于预测未来都不再提供任何额外的信息。 -
数学定义: 一个状态
是马尔可夫的,当且仅当: -
重要性: 它极大地简化了问题模型,使得我们可以仅根据当前状态来定义价值函数和制定决策。
2. 交互的实践: 轨迹与任务类型
2.1. 轨迹 (Trajectory) / 经验 (Experience)
轨迹 (也称 Episode, Rollout) 是智能体与环境进行一系列连续交互后产生的序列记录。它是所有学习算法赖以运行的数据基础。
- 定义: 一条轨迹
是由状态、行动、奖励组成的序列:
2.2. 任务类型与统一框架
- 分幕式任务 (Episodic Tasks): 任务有明确的终点(终止状态, Terminal State)。例如,一局棋、一轮游戏。
- 连续性任务 (Continuing Tasks): 任务没有终点,会无限进行下去。例如,机器人维持平衡。
处理目标状态的两种哲学 (Option 1 vs. Option 2)
我们可以通过不同的建模方式来处理任务的“目标”或“终点”。
-
Option 1: 吸收状态 (Absorbing State):
- 做法: 将所有终止状态转换为一个特殊的吸收状态。一旦进入,智能体将永远无法离开,且后续所有奖励均为零。
- 效果: 这是一种将分幕式任务在数学上统一为连续性任务的技巧。无限回报公式
会在进入吸收状态后自然截断,极大地简化了理论和算法设计。
-
Option 2: 普通奖励状态 (Normal Rewarding State):
- 做法: 将目标状态视为一个普通的、可重复访问的状态。智能体在每次进入该状态时获得奖励,但任务不结束,它必须选择行动离开。
- 效果: 这定义了一个纯粹的连续性任务,目标通常是最大化长期平均回报率。这适用于需要持续运行和优化的任务,如资源管理或机器人巡航。
| 特征 | Option 1: 吸收状态 | Option 2: 普通奖励状态 |
|---|---|---|
| 任务类型 | 分幕式任务 (Episodic) | 连续性任务 (Continuing) |
| 目标状态角色 | 任务的终点 (Terminal State) | 任务中的可重复访问的奖励点 |
| 能否离开 | 不能 | 可以 |
| 优化目标 | 在一幕内最大化累积回报 | 在无限时间内最大化平均回报率 |
| 典型应用 | 游戏、有明确成败条件的任务 | 资源管理、过程控制、机器人巡航 |
2.3. 轨迹在学习中的作用
轨迹是智能体学习的原材料。不同算法利用轨迹的方式不同:
- 蒙特卡洛 (MC) 方法: 使用完整的轨迹 (Episode) 来计算真实回报
。 - 时序差分 (TD) 方法: 使用轨迹的单步片段
进行学习,无需等待一幕结束。 - 策略梯度 (PG) 方法: 通常也需要完整的轨迹来评估策略性能。
- 经验回放 (Experience Replay): 将大量轨迹的单步片段存储在回放池中,随机采样进行训练,提高样本利用率。
2. 目标:回报与折扣因子
2.1. 回报 (Return,
回报 (Return,
回报是根据智能体实际经历过的一条轨迹
具体计算方式取决于任务类型:
-
对于分幕式任务 (Episodic Tasks):
任务会在有限的时间步后结束。回报 是从 到最终奖励 的简单求和。 其中
是终止状态对应的时间步。 -
对于连续性任务 (Continuing Tasks):
任务永远不会结束 ()。简单的求和可能会导致回报发散到无穷大。因此,我们必须使用下面将要介绍的折扣回报。
示例:使用轨迹计算回报
让我们回到之前的吃豆人游戏轨迹:
这是一个分幕式任务,在时间步
-
(从起点开始的回报): 这是整个轨迹的总奖励。
-
(从状态 开始的回报):
-
(从状态 开始的回报):
-
(在终止状态 的回报):
按照惯例,终止状态之后没有未来奖励,所以回报为 0。
重要区别:
- 回报
: 是从一条实际发生的轨迹中计算出的具体数值。它是一个样本 (sample)。 - 价值函数
: 是回报的期望值 。它代表了从状态 出发,遵循策略 平均能获得的回报,考虑了所有可能的轨迹。
2.2. 折扣因子 (Discount Factor,
为了统一分幕式和连续性任务,并反映“未来的奖励不如眼前的奖励有价值”这一经济学直觉,我们引入折扣因子
-
折扣回报 (Discounted Return):
- 这个公式现在对两种任务类型都适用。在分幕式任务中,当
使得 时,所有后续的 都为 0,求和自动终止。 - 在连续性任务中,只要奖励有界且
,这个无穷级数就能保证收敛,使得回报是一个有限值。
- 这个公式现在对两种任务类型都适用。在分幕式任务中,当
-
的作用: 通过控制 我们可以使得 (短视): 智能体只关心即时奖励 。 (远视): 智能体对未来奖励和即时奖励几乎同等看待。
示例:计算折扣回报
假设
注意,回报的计算可以写成这种方便的递归形式:
3. 价值函数 (Value Function)
为了评估一个策略的好坏,我们需要知道在某个状态或采取某个行动后,预期能获得多少回报。这就是价值函数的作用。
3.1. 状态价值函数 (State-Value Function,
- 定义: 从状态
开始,遵循策略 ,能够获得的期望回报。 - 公式:
- 解读:
回答了“在策略 下,处于状态 有多好?”这个问题。
3.2. 状态-行动价值函数 (Action-Value Function,
- 定义: 在状态
下,采取行动 ,然后遵循策略 ,能够获得的期望回报。 - 公式:
- 解读:
回答了“在策略 下,于状态 采取行动 有多好?”这个问题。 函数通常比 函数更有用,因为它直接告诉我们选择哪个动作更好。
3.3 联系
策略、轨迹与价值函数的关系 (The relationship between Policy, Trajectory and State Value)
3.4. 价值函数的估计:从贝尔曼方程到自举
既然价值函数是回报的期望,我们该如何从智能体的经验(轨迹)中估计它呢?核心在于利用价值函数内在的递归结构,这个结构由贝尔曼方程 (Bellman Equation) 描述。
贝尔曼期望方程 (Bellman Expectation Equation)
我们首先从折扣回报
通过提取公因子
这个简单的关系是所有贝尔曼方程的基石。
现在,我们对这个等式两边取期望,就能得到状态价值函数
-
标量形式 (Scalar Form):
对于任何状态,其价值等于在该状态下遵循策略 能获得的期望立即奖励,加上所有可能后继状态 的期望折扣价值。 更具体地展开:
这个方程揭示了一个状态的真实价值
与其后继状态的真实价值 之间的内在联系。 -
向量形式 (Vector Form):
如果我们将所有状态的价值视为一个向量,将期望立即奖励视为向量 ,将策略下的状态转移概率视为矩阵 ,那么整个系统的贝尔曼期望方程可以被优雅地写成一个线性方程: 这个方程存在一个解析解:
。这表明,如果环境模型已知,我们可以直接计算出价值函数。但在大多数RL问题中,模型是未知的,因此我们需要基于样本的学习方法。
方法一:蒙特卡洛 (MC) - 基于样本回报
MC 方法忽略了贝尔曼方程提供的状态间关系,它直接使用回报
- 核心思想: 运行一个完整的 episode,记录下整条轨迹。对于轨迹中的每一个状态
,我们都计算出了它后面跟着的真实回报 。那么,这个 就是对 的一个无偏估计。 - 更新方式:
- 特点:
- 优点: 无偏 (Unbiased)。因为
是对 的真实、无偏差的采样。 - 缺点: 高方差 (High Variance)。单次轨迹的随机性很大,可能导致估计值剧烈波动。必须等待一个 episode 结束才能进行学习。
- 优点: 无偏 (Unbiased)。因为
方法二:自举 (Bootstrapping) - 基于贝尔曼方程
Bootstrapping 的意思是“拔靴带”,引申为“自我提升”。在RL中,它指利用贝尔曼方程的结构,使用当前的价值估计来更新价值估计。这是时序差分 (Temporal Difference, TD) 学习方法的核心。
-
核心思想:
贝尔曼方程告诉我们。TD 学习正是利用这一点。它不再等待整个 episode 结束来获得完整的 ,而是只走一步得到一个样本 。然后,它用当前的、不完美的价值估计 来构造一个对 的新估计,这个新估计被称为 TD 目标 (TD Target)。 -
学习目标 (TD Target):
这个目标是自举的,因为它部分基于真实的样本 (
),部分基于一个自身的旧有估计 ( )。 -
更新方式:
TD 算法通过让当前的价值估计朝着这个 TD 目标移动一小步来进行学习。 括号中的部分
被称为时序差分误差 (TD Error)。 -
特点:
- 优点: 低方差 (Low Variance)。更新不依赖于一条完整的随机轨迹,更平滑。可以在线学习 (Online),每一步都更新,效率高。
- 缺点: 有偏 (Biased)。因为学习目标
本身就是一个不准确的估计。你在用一个估计去更新另一个估计。当初始估计不准时,这个偏差可能会在系统中传播。
总结:
- MC: 使用实际回报
作为更新目标,直接对 进行采样。 - TD (Bootstrapping): 使用估计的回报
作为更新目标,利用了 的贝尔曼关系。
这种“用估计更新估计”的自举思想是现代强化学习算法(如Q-Learning, SARSA, Actor-Critic)的基石。
对比蒙特卡洛 (MC) 与自举 (TD): 同一公式,两种哲学
我们的目标是估计状态
假设我们当前处于状态
1. 蒙特卡洛 (MC) 的计算方式:“求到底”
蒙特卡洛方法看到这个递归公式,它的处理方式是彻底展开,直到终点。
对于 MC 来说,
MC 的计算流程:
- 等待: 从
开始,必须完成整个 episode,收集到未来所有的奖励 。 - 求和: 将所有收集到的未来奖励进行折扣求和,计算出
的具体、完整的样本值。 - 更新: 使用这个完整的样本值
作为 的学习目标。
MC 的哲学: 要想知道
2. 时序差分 (TD) / 自举 (Bootstrapping) 的计算方式:“信一步,靠估计”
时序差分 (TD) 方法看到同一个递归公式
对于 TD 来说,它并不关心
"虽然我不知道
的真实值是多少,但我有一个对它的期望值的估计,那就是我当前的价值函数 。我就用这个估计来代替真实的 吧!"
TD 的计算流程:
- 走一步: 从
开始,只需要执行一个行动,获得一个立即奖励 和一个下一个状态 。 - 查表/估计: 查找或计算出下一个状态的当前价值估计
。 - 构建目标: 将真实的立即奖励
和对未来的价值估计 结合起来,构建一个自举的学习目标 (TD Target)。 在这里, 被用作对 的一个代理 (proxy) 或 估计 (estimate)。 - 更新: 使用这个混合了真实与估计的目标来更新
。
TD 的哲学: 我不需要知道未来的所有细节。我只需要知道我下一步能得到的真实奖励,以及我相信的、从那以后能得到的总价值。我用我当前的信念 (current belief) 来更新我之前的信念 (previous belief)。
总结对比
| 特征 | 蒙特卡洛 (MC) | 时序差分 (TD) / 自举 |
|---|---|---|
| 对 |
完全展开,计算 |
只展开一步,用 |
| 更新目标 (Target) | ||
| 何时更新 | Episode 结束时 | 每走一步 (online) |
| 偏差 (Bias) | 无偏 (目标是真实回报的无偏样本) | 有偏 (目标依赖于一个可能不准的估计 |
| 方差 (Variance) | 高方差 (依赖于一整条随机轨迹) | 低方差 (只依赖于一步的随机性) |
4. 贝尔曼方程 (Bellman Equations)
贝尔曼方程是 RL 中最重要的公式之一,它将一个状态的价值与其后继状态的价值关联起来,提供了迭代求解价值函数的方法。
4.1. 贝尔曼期望方程 (Bellman Expectation Equation)
-
的贝尔曼方程: 两个贝尔曼公式的互推 (The mutual derivation of two Bellman formulas)
- 当前状态的价值 = 所有可能行动的期望价值。
- 某个行动的价值 = 所有可能后继状态的(即时奖励 + 折扣后的未来价值)的期望。
-
的贝尔曼方程:
4.2. 贝尔曼最优方程 (Bellman Optimality Equation)
最优策略
-
的贝尔曼最优方程: - 最优状态价值等于所有行动中能带来的最大期望回报。
-
的贝尔曼最优方程: - 如果知道了最优
函数,那么最优策略就是贪心策略 (Greedy Policy):
- 如果知道了最优
RL 算法的核心任务,就是通过各种方法求解贝尔曼最优方程,找到
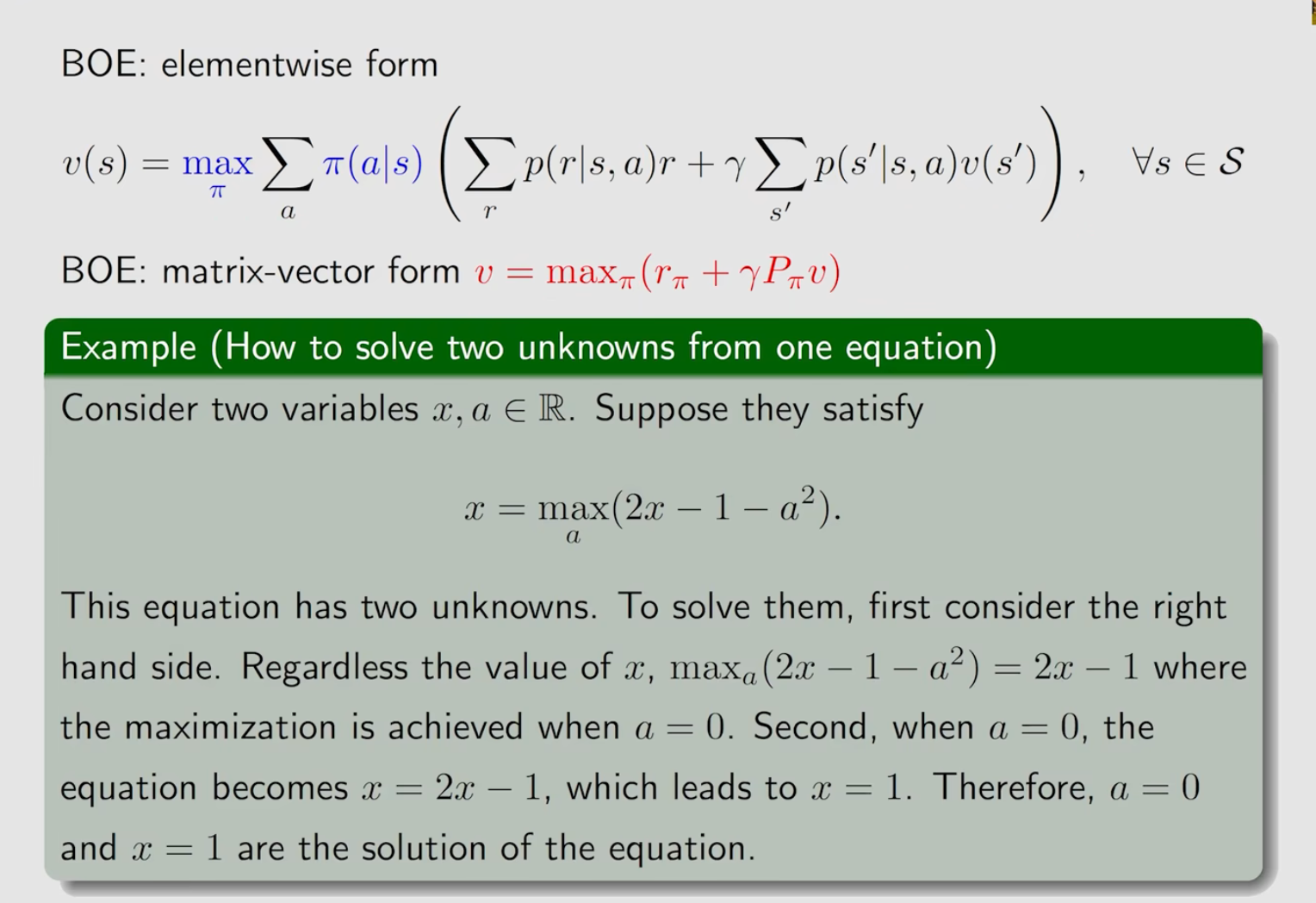
How to solve two unknowns from one equation
4.3 贝尔曼最优方程 (Bellman Optimality Equation, BOE) 与求解
在我们介绍了用于评估一个给定策略的贝尔曼期望方程之后,现在我们来看如何寻找最优策略。这需要用到贝尔曼最优方程 (BOE)。
BOE 的核心思想是:最优策略下的价值函数,必须等于在所有可能的单步行动中,选择那个能带来最大期望回报的行动所对应的价值。
4.3.1 BOE 的两种形式:V* 和 Q*
首先,我们将最优价值函数记为 v*,它代表了在所有策略中能达到的最大期望回报。
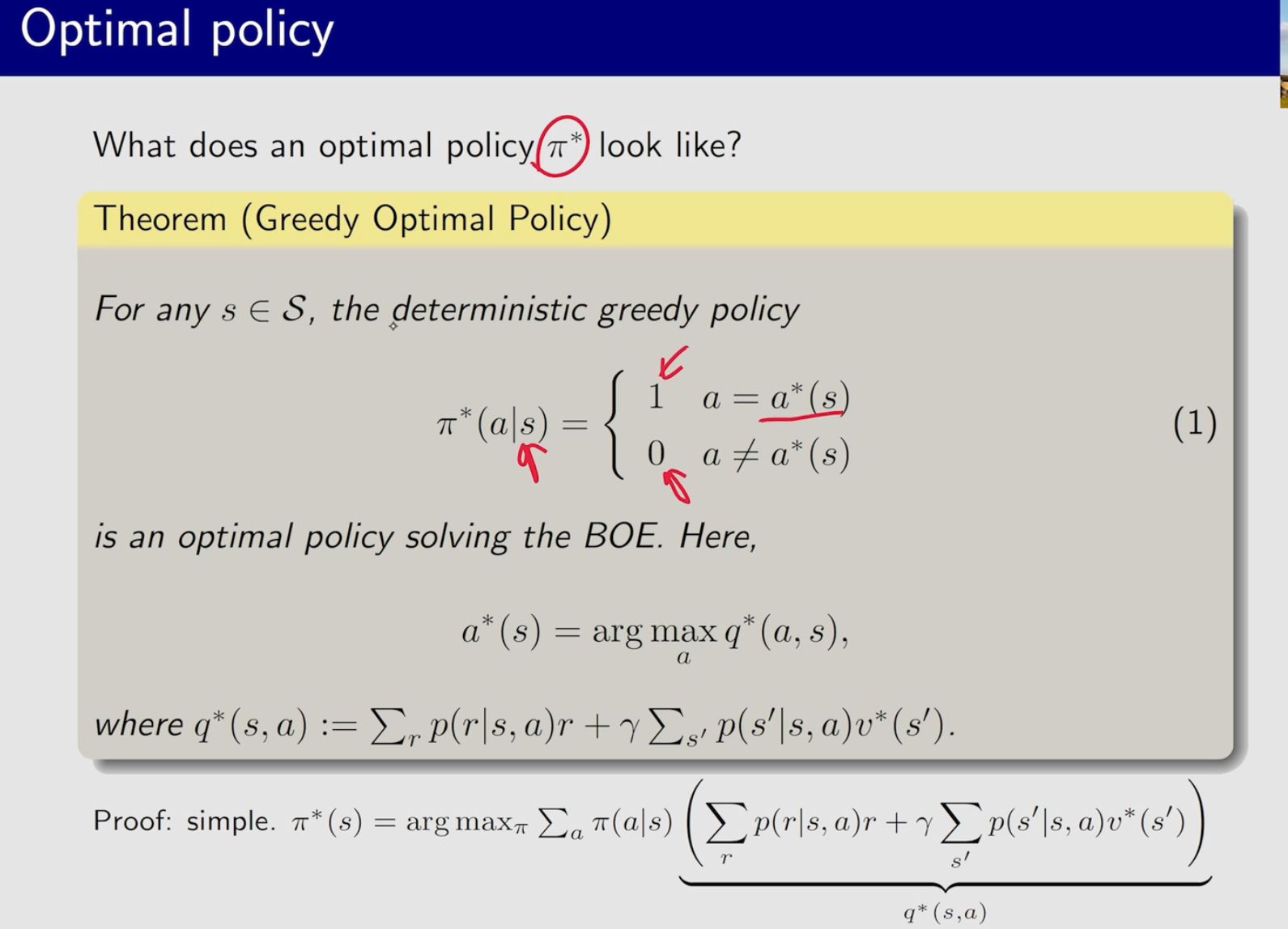
状态价值函数的最优方程 (BOE for v)*
正如图片第一行所示,v*(s) 必须满足以下条件:
这个方程和贝尔曼期望方程非常像,唯一的区别是把期望算子 Σ_a π(a|s) 换成了最大化算子 max_a。它表示最优价值等于选择最优单步行动 a 后能得到的期望回报。
行动价值函数的最优方程 (BOE for q)*
为了更好地理解这个方程,我们引入最优行动价值函数 q*(s, a)。
q*(s, a):在状态s采取行动a,然后从那以后都遵循最优策略所能得到的期望回报。这正是图片中第一个方程括号里的那部分!
将 q* 代入 v* 的方程,我们得到一个至关重要的关系:
直观理解:一个状态的最优价值,等于在这个状态下所有可选行动的“最优Q值”中,最大的那一个。
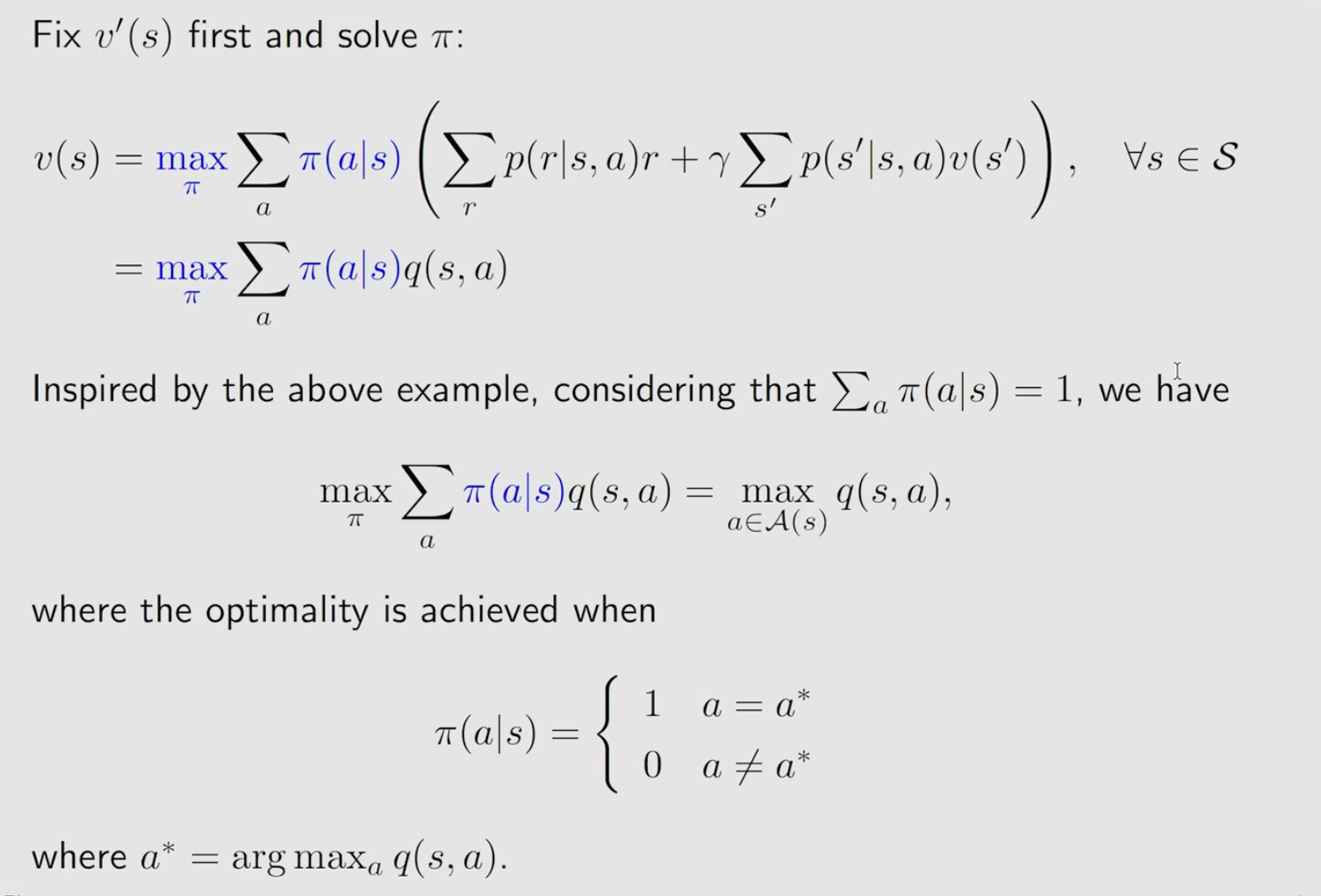
4.3.2 最优策略的真面目:贪心策略
现在,我们来看图片中最关键的推导,它揭示了最优策略 π* 的形式。
我们从 v* 的另一个定义出发:
这个式子问的是:“什么样的策略 π 能够最大化 q* 值的加权平均?”
核心洞察 (图片中的推导):
- 问题: 我们要最大化一个加权平均
Σ π(a|s)q*(s,a),其中权重π(a|s)是概率(非负且和为1)。 - 类比: 想象你有 100 块钱(总概率为1),要投资到几个回报率不同(
q*(s,a)值不同)的项目(行动a)中去。为了让总收益最大,你会怎么投资? - 答案: 你会把所有钱(100%的概率)都投到那个回报率最高的项目(
q*值最大的行动a*)上。 - 结论:
这个最大值是在一个确定性的、贪心的策略下取得的。
这个推导告诉我们一个惊人的事实:
对于任何 MDP,至少存在一个最优策略是确定性的。这个策略就是简单地在每个状态下,选择那个具有最大
q*值的行动。
最优策略 π* 的形式:
4.3.3 总结与应用
这个发现是强化学习的基石之一:
- 目标简化: 我们寻找最优策略
π*的问题,被转化为了寻找最优行动价值函数q*的问题。 - 决策简化: 一旦我们通过某种方式(例如,价值迭代或 Q-Learning)得到了
q*,那么在任何状态s下,最优的决策就是简单地执行argmax_a q*(s, a),无需再进行复杂的规划。
这解释了为什么 Q-Learning 算法的核心是学习一个 Q-table:因为这个 Q-table(对 q* 的估计)已经隐式地包含了最优策略的所有信息。
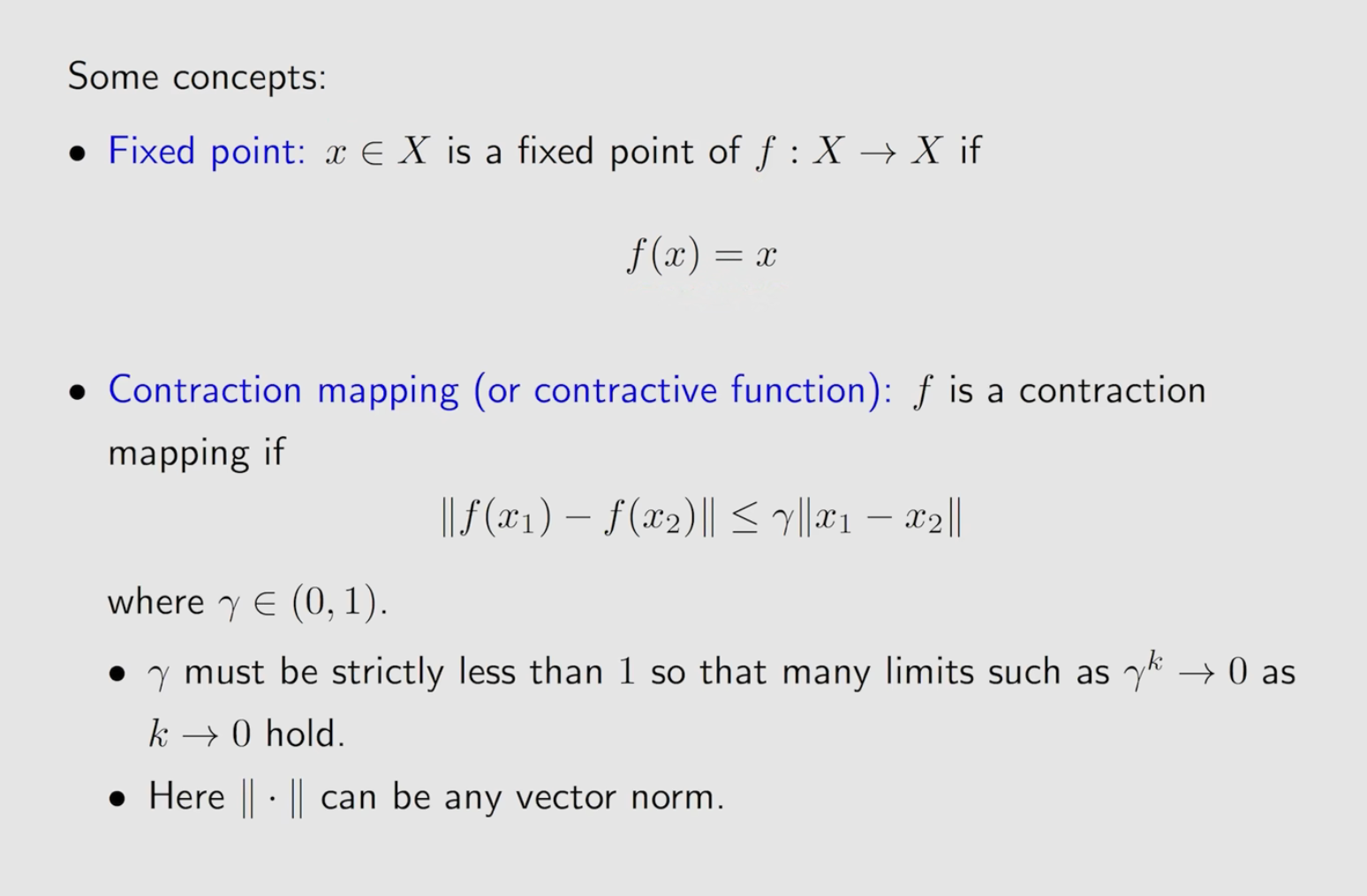
4.4 求解贝尔曼方程:压缩映射理论
我们已经知道,最优价值函数 v* 必须满足贝尔曼最优方程 (BOE)。但这个方程形式复杂,我们如何能确定它有解?解是否唯一?又该如何找到这个解?
要回答这些问题,我们需要借助强大的数学工具。这张图片中介绍的两个概念正是解答这一切的钥匙。
4.4.1 核心数学概念详解
不动点 (Fixed Point)
-
定义: 正如图片所示,对于一个函数(或更广义的“算子”、“变换”)
f,如果将它作用于某个点x后,得到的结果仍然是x本身,那么x就是f的一个不动点。 -
直观理解: 想象一个函数
f是对空间中所有点的一次移动。不动点就是在这次移动中纹丝不动的那个点。 -
与强化学习的联系: 我们可以将贝尔曼最优方程视为一个不动点问题。定义一个贝尔曼最优算子
T,它的作用就是对任意一个价值函数v进行一次贝尔曼更新:那么,贝尔曼最优方程
v* = T(v*)就可以被理解为:最优价值函数v*正是贝尔曼最优算子T的不动点。我们的目标,就是找到这个算子的不动点。
压缩映射 (Contraction Mapping)
-
定义: 一个函数
f如果是压缩映射,意味着将它作用于任意两个不同的点x₁和x₂后,新产生的两个点f(x₁)和f(x₂)之间的距离,会比原来两点间的距离严格地缩小。其中,压缩因子
γ是一个介于[0, 1)之间的常数。 -
直观理解: 压缩映射就像一个能把整个空间“向内挤压”的变换。无论你从空间中哪两个点开始,只要经过一次
f变换,它们之间的距离就会至少缩短γ倍。反复进行这个变换,整个空间中的所有点最终都会被“挤”向同一个点。 -
关键要素:
γ必须严格小于 1。这是保证“压缩”效果的关键。如果γ=1,距离可能保持不变(例如旋转),就无法保证收敛。|| ⋅ ||是范数 (norm),代表了一种测量向量间“距离”的方式。这个理论的强大之处在于它对任何一种常见的距离度量方式(如欧几里得距离、曼哈顿距离等)都成立。
4.4.2 巴拿赫不动点定理 (Banach Fixed-Point Theorem)
这个定理是连接以上两个概念的桥梁,它给出了一个惊人的结论:
在一个完备的度量空间中,任何一个压缩映射都拥有一个且仅有一个唯一的不动点。
此外,从空间中的任意一个初始点
x₀出发,通过反复迭代x_{k+1} = f(x_k),所得到的序列必然会收敛到这个唯一的不动点,且为指数级别的收敛速度。
4.4.3 理论与强化学习的完美结合
现在,我们可以将所有碎片拼凑起来了。核心结论是:
可以证明,贝尔曼最优算子 T 正是一个以折扣因子 γ 为压缩因子的压缩映射。
基于这个事实和巴拿赫不动点定理,我们得到了关于强化学习的三个根本性保证:
-
解的存在且唯一 (Existence and Uniqueness)
因为T是一个压缩映射,所以它必然存在一个唯一的不动点。这意味着最优价值函数v*不仅存在,而且是唯一的。我们寻找的目标是明确且唯一的。 -
价值迭代算法的收敛性保证 (Convergence Guarantee)
定理保证了从任意点开始的迭代序列v_{k+1} = T(v_k)必将收敛到不动点v*。而这正是价值迭代 (Value Iteration) 算法的数学形式!这从理论上证明了,只要我们不断地用贝尔曼最优方程去更新价值函数,最终一定能得到正确的最优价值函数。 -
对初始值的无关性 (Independence of Initialization)
我们可以从任意一个初始价值函数v₀(比如,一个全零的向量)开始迭代,最终都会收敛到同一个v*。这使得算法的实现非常鲁棒。
总结:压缩映射理论为强化学习提供了一块坚实的数学基石。它告诉我们,v* 的求解问题是良定 (well-posed) 的,并且像价值迭代这样的朴素算法是保证有效的。折扣因子 γ 在这里扮演了至关重要的数学角色——正是它确保了贝尔曼算子的压缩性质,从而保证了整个理论框架的成立。
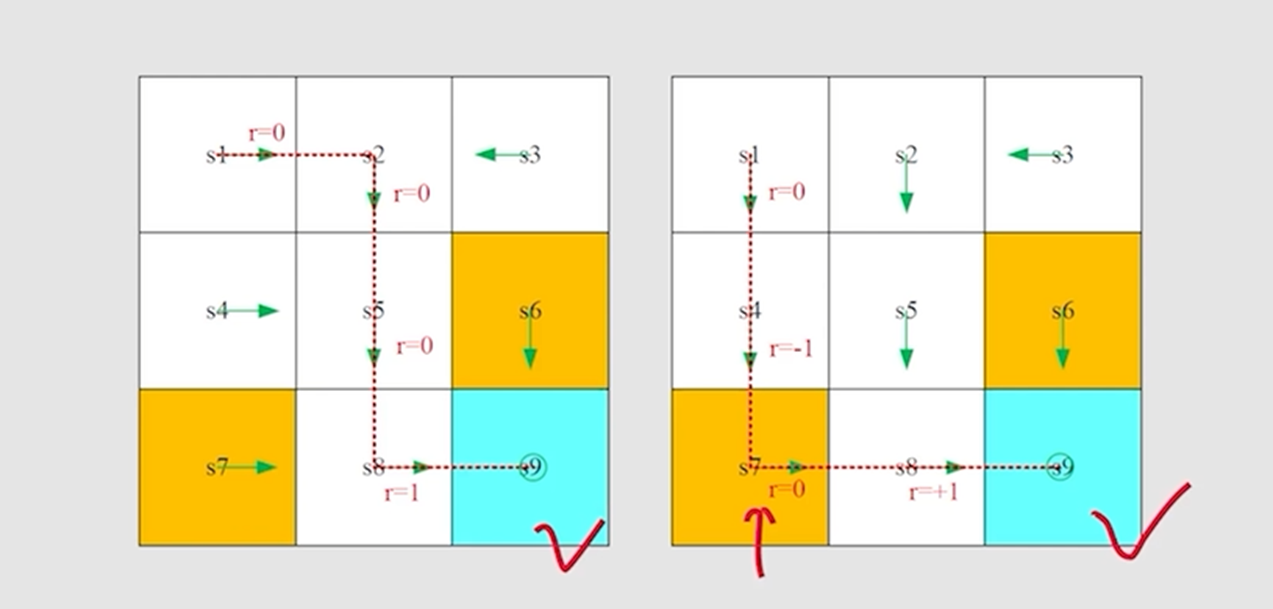
好的,这是一个非常重要且具有深刻实践意义的定理,它被称为**“奖励整形 (Reward Shaping)”** 的理论基础之一。这个定理告诉我们,在什么情况下改变奖励函数不会改变最终的最优策略。
我会将它作为 4.4 节加入到贝尔曼最优方程的讨论之后,因为它正是建立在 BOE 的基础上的。
4.5 定理:最优策略的仿射变换不变性 (Optimal Policy Invariance)
我们已经知道,奖励函数 R 是我们与智能体沟通目标的接口。一个自然的问题是:如果我们改变了奖励函数,最优策略会如何变化?这个定理给出了一个强有力的答案。
定理 (最优策略不变性)
如果我们将环境中的每一个奖励
r都进行一次仿射变换 (Affine Transformation),从r变为a*r + b(其中a是一个正数常量,b是任意实数常量),那么:
- 新的最优价值函数
v'是原最优价值函数v*的一个线性变换。- 最优策略
π*保持完全不变。
数学表述
-
前提:
- 原 MDP 的奖励为
r,最优价值函数为v*。 - 新的 MDP 的奖励为
r' = a*r + b,其中a > 0,b是常数。其最优价值函数为v'。
- 原 MDP 的奖励为
-
结论 1 (价值函数的变化):
新的最优价值函数v'与旧的v*之间的关系为:其中,
1是一个所有元素都为 1 的向量。这意味着每个状态的价值都被缩放了a倍,并加上了一个常量b / (1-γ)。 -
结论 2 (策略的不变性):
两个 MDP 的最优策略是完全相同的。
直观理解与为什么成立
为什么会这样?关键在于最优策略只关心不同行动之间的“相对好坏”,而不关心它们的“绝对价值”。
最优策略 π*(s) 是通过 argmax_a q*(s, a) 来决定的。我们来看看 q*(s, a) 在奖励变换后会发生什么变化。
- 原
q*(s, a): 依赖于r和v* - 新
q'(s, a): 依赖于r'和v'(经过一些代数推导)
我们可以看到,新的 Q 函数 q' 也是旧 Q 函数 q* 的一个线性变换:q'(s, a) = a * q*(s, a) + C,其中 C 是一个不依赖于行动 a 的常量。
关键洞察:
对一个函数的所有值都乘以一个正常数 a 并加上一个常量 C,并不会改变哪个输入能让函数取得最大值。
由于 argmax 不变,所以从 q* 推导出的最优策略 π* 也就保持不变。
实践意义 (奖励整形 Reward Shaping)
这个定理在实践中非常有用:
- 奖励归一化: 我们可以放心地将奖励缩放(例如,归一化到
[-1, 1]区间),这有助于稳定神经网络的训练,而不用担心会改变问题的本质。 - 避免稀疏奖励: 在很多问题中,奖励非常稀疏(大部分时间奖励为0)。我们可以给每一步都加上一个小的负奖励
b < 0(例如-0.01),来鼓励智能体尽快找到目标,而不会改变找到目标的最优路径。这个-0.01就是常数b。 - 理论指导: 它为我们设计和修改奖励函数提供了理论指导,让我们知道什么样的修改是“安全”的(不改变最优策略),什么样的修改会从根本上改变问题。
5. 求解贝尔曼最优方程:动态规划
我们已经有了贝尔曼最优方程,并且有理论保证它存在唯一解。那么,如何具体地求解它呢?当环境模型(即状态转移概率 P 和奖励函数 R)已知时,我们可以使用动态规划 (Dynamic Programming, DP) 的方法来精确求解。价值迭代和策略迭代是两种最核心的 DP 算法。
5.1 价值迭代 (Value Iteration, VI)
价值迭代算法的核心思想,正是我们之前讨论的巴拿赫不动点定理的直接应用。不动点定理告诉我们,只要反复应用一个压缩映射,无论从哪里开始,最终都会收敛到那个唯一的固定点。
核心思想:
价值迭代通过反复迭代贝尔曼最优方程,将当前的价值函数 v_k “更新”成一个更好的价值函数 v_{k+1},直到这个过程收敛。收敛时,我们就得到了最优价值函数 v*。
算法流程:
-
初始化: 任意初始化一个价值函数向量
v₀(通常是全零向量)。 -
迭代循环: 对于
k = 0, 1, 2, ...,重复以下步骤:- 对于每一个状态
s ∈ S,根据贝尔曼最优方程进行更新:- 关键点: 注意我们是用第
k次的价值函数v_k来计算第k+1次的价值函数v_{k+1}。这正是在反复应用贝尔曼最优算子T:v_{k+1} = T(v_k)。
- 关键点: 注意我们是用第
- 对于每一个状态
-
终止条件: 当价值函数的改变量足够小时,即
max_s |v_{k+1}(s) - v_k(s)| < ε(其中ε是一个很小的正数),则停止迭代。此时,我们认为v_{k+1} ≈ v*。 -
提取最优策略: 当价值函数收敛到
v*后,我们可以通过一次“向前看”来提取出最优策略π*:
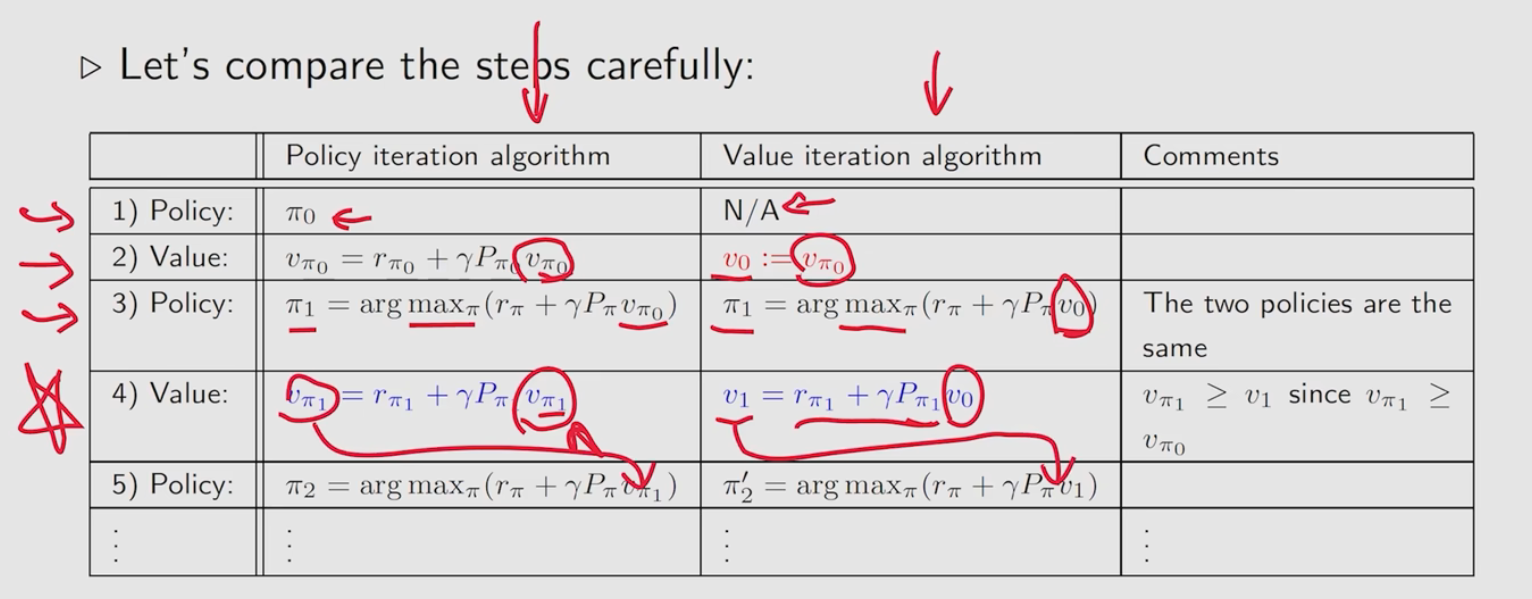
5.2 策略迭代 (Policy Iteration, PI)
策略迭代提供了另一种求解思路。它不像价值迭代那样直接在价值空间中寻找最优解,而是在策略空间中进行搜索。它由两个交替进行的步骤组成:策略评估和策略提升。
核心思想:
从一个任意的策略开始,不断地“评估这个策略有多好”,然后“根据评估结果找到一个更好的策略”,如此循环往复,直到策略不再变化,此时就找到了最优策略。
算法流程:
-
初始化: 任意初始化一个策略
π₀。 -
迭代循环: 对于
k = 0, 1, 2, ...,重复以下步骤:-
a) 策略评估 (Policy Evaluation):
- 目标: 计算当前策略
π_k的真实价值函数v_{π_k}。 - 方法: 求解该策略下的贝尔曼期望方程。
这通常通过迭代的方式求解,直到 v收敛(这本身就是一个小的价值迭代过程),或者通过矩阵求逆v_{π_k} = (I - γP_{π_k})⁻¹ r_{π_k}直接计算。
- 目标: 计算当前策略
-
b) 策略提升 (Policy Improvement):
- 目标: 基于刚刚计算出的价值函数
v_{π_k},找到一个比π_k更好(或一样好)的新策略π_{k+1}。 - 方法: 对每一个状态
s,我们贪心地选择能够最大化期望回报的行动:
- 目标: 基于刚刚计算出的价值函数
-
-
终止条件: 如果新策略与旧策略完全相同(
π_{k+1} = π_k),那么算法收敛,此时的策略就是最优策略π*,其对应的价值函数就是v*。
5.3 价值迭代 vs. 策略迭代
| 特征 | 价值迭代 (Value Iteration) | 策略迭代 (Policy Iteration) |
|---|---|---|
| 迭代对象 | 价值函数 v |
策略 π |
| 核心操作 | 反复应用贝尔曼最优算子 | 交替进行策略评估和策略提升 |
| 每次迭代 | 完整地遍历一次所有状态,进行一次max更新 |
包括一个可能需要多次迭代的策略评估步骤,和一个策略提升步骤 |
| 计算复杂度 | 每次迭代计算量固定且较小 | 每次迭代计算量大(尤其评估步骤),但通常收敛所需的总迭代次数更少 |
| 收敛性 | 渐近收敛到 v* |
在有限次迭代后精确收敛到 π* |
5.4 广义策略迭代 (Generalized Policy Iteration, GPI) 与截断策略迭代
策略迭代和价值迭代看似不同,但它们都遵循一个共同的模式,被称为广义策略迭代 (Generalized Policy Iteration, GPI)。GPI 指的是任何将策略评估 (Policy Evaluation) 和策略改进 (Policy Improvement) 交织在一起进行的方法。
- 策略评估 (PE): 使当前的价值函数
v趋向于当前策略π的真实价值v_π。 - 策略改进 (PI): 使当前的策略
π对于当前的价值函数v变得更贪心。
在这个 GPI 框架下,PI 和 VI 只是两个特例。
截断策略迭代 (Truncated Policy Iteration)
核心思想:我们不必在每次策略评估(PE)步骤中都等到价值函数完全收敛。我们可以只进行固定次数 m 的迭代,然后就进入策略改进(PI)步骤。
这种方法就被称为截断策略迭代 (Truncated Policy Iteration)。
算法流程:
- 初始化: 从一个任意的策略
π₀和价值函数v₀开始。 - 循环:
- a) 截断策略评估 (Truncated PE):
- 目标: 对当前策略
π_k进行不完全的评估。 - 方法: 从
v_k开始,使用贝尔曼期望方程迭代m次:v_temp = v_k for _ in range(m): v_temp = r_{π_k} + γ * P_{π_k} * v_temp # 经过 m 次更新后,得到一个对 v_{π_k} 的近似 v_{k+1} = v_temp
- 目标: 对当前策略
- b) 策略改进 (PI):
- 目标: 基于这个近似的价值函数
v_{k+1},找到一个贪心的新策略π_{k+1}。 - 方法:
- 目标: 基于这个近似的价值函数
- a) 截断策略评估 (Truncated PE):
- 终止: 直到策略或价值函数收敛。
为什么截断策略迭代是更广义的框架?
截断策略迭代通过调整参数 m(即评估步骤的迭代次数),可以无缝地变为策略迭代或价值迭代。
-
当
m -> ∞(评估到完全收敛):v_{k+1}会精确地等于当前策略π_k的真实价值v_{π_k}。- 此时,截断策略迭代就等价于标准的策略迭代 (Policy Iteration)。
-
当
m = 1(只评估一次):- 评估步骤变为:
v_{k+1} = r_{π_k} + γ * P_{π_k} * v_k。 - 而改进步骤是:
π_{k+1} = argmax based on v_{k+1}。 - 这个过程虽然看起来还是两步,但我们可以把
π_k和v_{k+1}这两个式子合并。将π_k的贪心定义代入,实际上它等价于价值迭代的核心更新步骤: - 因此,当
m=1时,截断策略迭代就等价于价值迭代 (Value Iteration)。
- 评估步骤变为:
总结与实践意义
-
一个统一的谱系: 截断策略迭代将 PI 和 VI 统一到了一个算法谱系中。
- 谱系的一端 (m=1): 价值迭代,每次评估都很“粗糙”,但更新很快。
- 谱系的另一端 (m=∞): 策略迭代,每次评估都“完美”,但成本高昂。
- 中间地带 (1 < m < ∞): 提供了在计算成本和收敛速度之间的灵活权衡。
-
实践中的优势: 在许多大规模问题中,我们既不想承担策略迭代中完全评估的巨大计算开销,也不想忍受价值迭代可能需要的非常多次的迭代。选择一个适中的
m值(例如m=5或m=10)进行截断策略迭代,通常是最快达到最优策略的方法。它在每次迭代中都取得了显著的进步,同时又控制了单次迭代的计算成本。
6. RL 算法分类
6.1 Model-Based vs. Model-Free
- 基于模型 (Model-Based): 智能体尝试学习或已知环境的模型(即状态转移概率
和奖励函数 ),然后利用模型进行规划(如动态规划)。 - 无模型 (Model-Free): 智能体不学习环境模型,直接通过与环境的交互经验来学习策略或价值函数。这是目前更主流的方法。
6.2 Value-Based vs. Policy-Based
- 基于价值 (Value-Based): 学习价值函数(通常是
函数),然后根据价值函数隐式地得到策略(如贪心策略)。 - 代表算法: Q-Learning, Sarsa, DQN。
- 基于策略 (Policy-Based): 直接学习策略函数
,即直接参数化策略。 - 代表算法: REINFORCE, Policy Gradients。
- 演员-评论家 (Actor-Critic): 结合以上两者。Actor (演员) 负责学习策略,Critic (评论家) 负责学习价值函数来评估 Actor 的表现,并指导其更新。
- 代表算法: A2C, A3C, DDPG, SAC。
6.3 On-Policy vs. Off-Policy
- 同策略 (On-Policy): 学习和决策使用同一个策略。即用来评估和改进的策略,就是当前智能体正在执行的策略。
- 特点: 稳健,但探索性差,样本利用率低。
- 代表算法: Sarsa, A2C。
- 异策略 (Off-Policy): 学习和决策使用不同的策略。智能体可以利用过去(甚至其他智能体)的经验数据来学习当前的目标策略。
- 特点: 样本利用率高,探索性强,但可能不稳定。
- 代表算法: Q-Learning, DQN, DDPG。
7. 蒙特卡洛(MC)强化学习算法
蒙特卡洛(Monte Carlo, MC)方法是强化学习中一类非常重要的 无模型(Model-Free) 算法。
核心思想:它不依赖于环境模型(即不知道状态转移概率 P 和奖励函数 R),而是通过与环境交互,从完整的、有始有终的“回合”(Episode)中学习。智能体必须跑完一整个回合,拿到最终的奖励,然后回头更新这一路上所做的决策的价值。
7.1. 广义策略迭代 (GPI) - 无模型学习的核心框架
在进入具体算法之前,我们需要理解一个统一所有强化学习方法的核心思想——广义策略迭代 (Generalized Policy Iteration, GPI)。
- 它不是一个具体的算法,而是一个通用的框架或思想。
- 核心思想: GPI 指的是策略评估 (Policy Evaluation) 和策略改进 (Policy Improvement) 这两个过程相互作用、交替进行的通用模式。
GPI 的两个组成部分
-
策略评估 (Policy Evaluation):
- 目标: 估计当前策略
π的价值函数 (v_π或q_π)。 - 在无模型设定下,我们无法直接计算,只能通过采样(例如,运行很多次游戏,取平均分)来近似估计。
- 目标: 估计当前策略
-
策略改进 (Policy Improvement):
- 目标: 基于当前的价值估计,通过变得对价值函数更贪心 (greedy) 来找到一个更好的策略
π'。 - 这个过程和之前一样,即
π'(s) = argmax_a q(s,a)。
- 目标: 基于当前的价值估计,通过变得对价值函数更贪心 (greedy) 来找到一个更好的策略
GPI 的工作机制
这两个过程相互竞争又相互协作,最终将策略和价值函数推向最优:
- 评估驱使价值函数
v与当前策略π保持一致。 - 改进驱使策略
π与当前价值函数v变得贪心,从而打破之前的一致性。
可以想象策略和价值函数在跳一支双人舞,它们不断调整自己以适应对方。只要我们保证两个过程都在不断进行(不要求任何一方必须完全收敛),最终整个系统就会收敛到一个稳定的平衡点。在这个平衡点,价值函数与策略完全一致,同时策略相对于价值函数也是贪心的,此时我们就找到了最优策略 π* 和最优价值函数 v*。
GPI 的普适性
GPI 是一个极其通用的框架。
- 我们之前讨论的策略迭代是 GPI 的一个特例,其中“评估”步骤被执行到完全收敛。
- 我们之前讨论的价值迭代也是 GPI 的一个特例,其中“评估”步骤被截断为只迭代一次。
- 接下来要介绍的所有无模型控制算法,如蒙特卡洛控制和Q-Learning,也都可以被看作是 GPI 的具体实现。它们只是在“如何用样本进行策略评估”这一点上有所不同。
7.2 最简单的MC算法:MC Basic (用于策略评估)
这里的 "MC Basic" 通常指的是蒙特卡洛策略评估(MC Policy Evaluation),即在给定一个策略 π 的情况下,计算出这个策略的状态价值函数 V(s)。
-
目标:评估一个固定策略
π的好坏。 -
算法流程:
- 遵循策略
π:让智能体(Agent)根据给定的策略π玩一整个回合(Episode),从开始到结束,记录下整个轨迹(状态、动作、奖励序列)。 - 计算回报(Return):对于这个回合中第一次出现的每一个状态
s,计算从这个状态开始直到回合结束所获得的累积奖励G_t。G_t = R_{t+1} + γR_{t+2} + ...(其中γ是折扣因子)- 这被称为 首次访问MC(First-Visit MC)。也可以用每次访问MC(Every-Visit MC),即计算每次访问该状态时的回报。通常用前者。
- 更新价值:将计算出的回报
G_t更新到状态s的价值估计中。最简单的方法是直接求平均值。V(s) ← average(Returns(s))
- 重复:重复以上步骤很多次回合,根据大数定律,
V(s)会逐渐收敛到真实的价值。
- 遵循策略
-
局限性:
- 这只是一个评估算法,它只能告诉你一个策略有多好,但不能帮你找到更好的策略。
- 为了找到最优策略,我们需要进入“控制”阶段。
7.3 更高效地利用数据:MC Exploring Starts (用于策略控制)
为了找到最优策略(控制问题),我们需要评估动作价值函数 Q(s, a),而不仅仅是 V(s)。但这里有一个关键问题:如果我们当前的策略从不在某个状态 s 尝试动作 a,我们就永远无法知道 Q(s, a) 的值,也就无法改进策略。
“探索性开端”(Exploring Starts, ES) 就是为了解决这个问题而提出的一种强力假设。
- 目标:在保证充分探索的前提下,找到最优策略。
- 核心假设 (Exploring Starts):在每一回合开始时,我们随机选择一个状态
s和一个动作a作为起点,然后才开始遵循当前策略。 - 为什么“更高效”:这个假设保证了所有的状态-动作对 (s, a) 都有机会被访问到。这样一来,我们收集到的数据就能覆盖所有可能性,从而可以准确地评估每一个
Q(s, a),最终找到全局最优解。 - 算法流程(MC ES 控制算法):
- 初始化一个随机的
Q(s, a)表和一个基于它的确定性策略π。 - 循环(很多回合):
a. 使用 探索性开端 开始一个新回合(随机选择s和a)。
b. 根据当前策略π完成该回合。
c. 计算回合中每个 (s, a) 对的回报G_t。
d. 更新Q(s, a) ← average(Returns(s, a))。
e. 策略改进:在每个回合结束后,根据更新后的Q表来改进策略。对于每个状态s,让新的策略选择能使Q(s, a)最大化的那个动作a。π(s) ← argmax_a Q(s, a)
- 初始化一个随机的
- 局限性:
- 不切实际:“探索性开端”这个假设在现实世界中往往是无法实现的。例如,你不能让一个机器人凭空出现在某个特定的姿势(状态)并强制它执行某个动作(动作)来开始任务。
The comparison of DP, MC and TD
7.4 移除探索性开端:MC ε-Greedy (更实用的策略控制)
既然“探索性开端”不实用,我们就需要一种新的方法来确保在与环境交互的过程中,智能体能自己进行探索。ε-贪心(Epsilon-Greedy) 策略就是最常用和最简单的方法。
-
目标:在没有探索性开端假设的情况下,找到最优策略。
-
核心思想:平衡 探索(Exploration) 和 利用(Exploitation)。
- 利用:在绝大多数时间(概率
1-ε)里,选择当前看来最好的动作(即Q(s, a)值最大的那个a)。 - 探索:在少数时间(概率
ε)里,随机选择一个动作,给其他“看起来不那么好”的动作一个机会,万一它们其实更好呢?
- 利用:在绝大多数时间(概率
-
算法流程 (On-Policy MC Control with ε-Greedy):
- 初始化一个随机的
Q(s, a)表。 - 基于这个
Q表,构建一个 ε-贪心策略π。 - 循环(很多回合):
a. 使用当前的 ε-贪心策略π来生成一个完整的回合(这次是从固定的起始状态开始)。
b. 计算回合中每个 (s, a) 对的回报G_t。
c. 更新Q(s, a) ← average(Returns(s, a))。
d. 策略自动改进:因为我们的策略π是直接基于Q表的(ε-贪心),所以当我们更新了Q表后,策略π的行为也自动地被改进了。下一次它在做决策时,就会参考新的Q值。
- 初始化一个随机的
-
优势:
- 实用性强:不再需要不切实际的假设,适用于各种环境。
- 保证收敛:理论上可以证明,只要
ε大于0,并且我们不断更新,这个算法最终能收敛到最优策略。
总结与演进关系
- MC Basic:只能评估一个给定的策略,无法改进它。
- MC Exploring Starts:为了改进策略,引入了“探索性开端”的强假设来保证充分探索,从而能学习最优策略。
- MC ε-Greedy:抛弃了不切实际的“探索性开端”假设,通过在策略层面引入随机性(ε-贪心),实现了实用且有效的探索,是真正能在实际问题中应用的MC控制算法。